Developing an Interactive Socially Assistive Robot
My dissertation project where I created a viable, affordable robot using Python software and a Raspberry Pi.
Abstract
This project analyses the current products available in the socially assistive robotics field. Many of these products only cater to one field of assistance, whether that is educational or geriatric care. What features these products offer and how they are used is a key factor in developing a successful robot.
The idea for this project is to take inspiration from the existing products and to make improvements on their features and allowing the robot to be used in different fields of assistance. Therefore, the main aim is to produce an affordable robot, that has interactive features that aid in social activities.
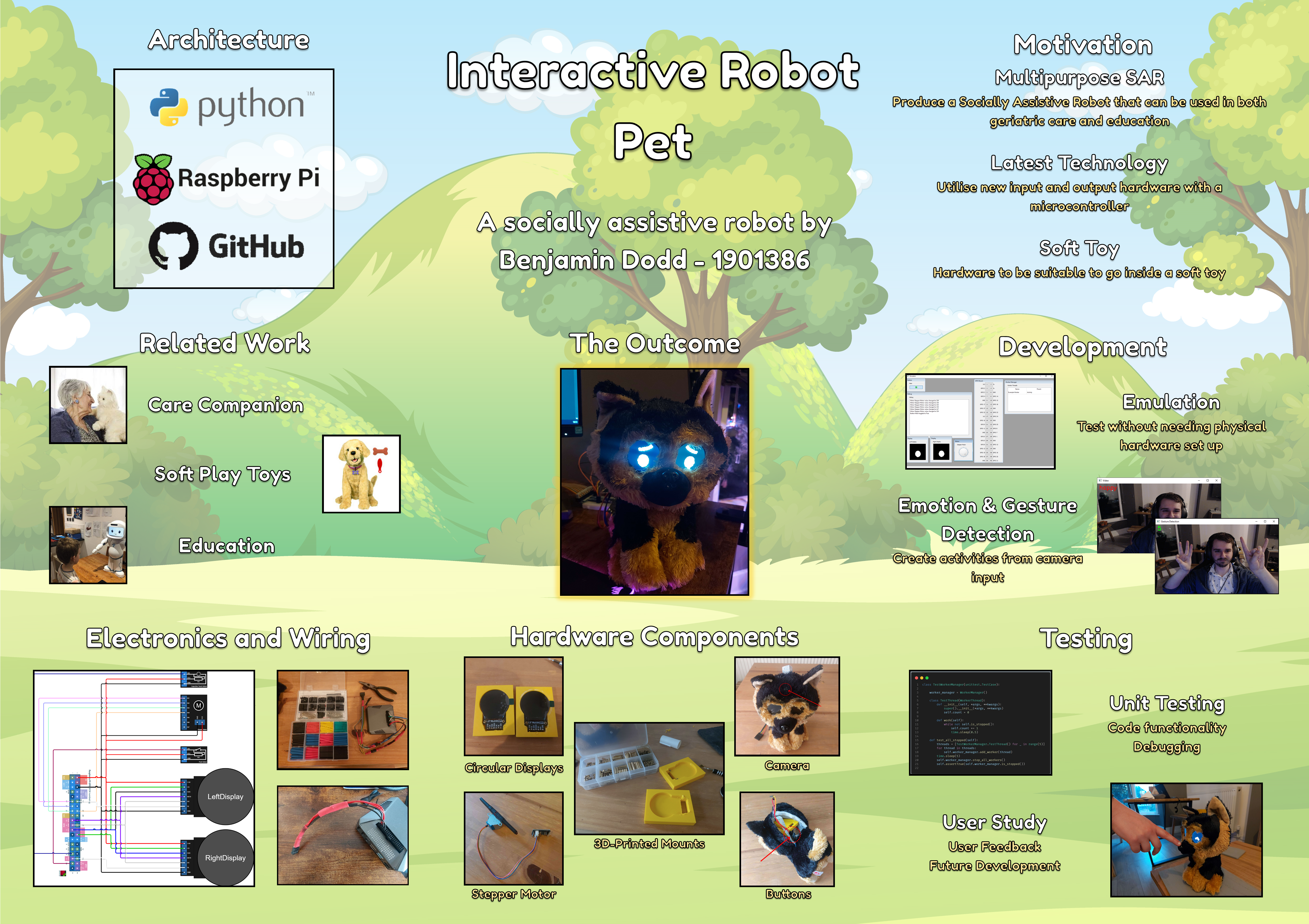
By following a prototype methodology, numerous iterations of the robot were produced and improved upon, with both the hardware and software implementation. The hardware was selected so that it could be contained inside of a soft toy. To improve the workflow, emulation software is used to test the software without requiring the hardware to be completely setup.
Using Python as the language for the software, combined with the libraries of the hardware, an activity-based system was produced. This software controls two circular displays in the position of eyes, that convey information about the activity. Furthermore, a stepper motor is used to turn the head of the soft toy, to convey body language. The user can interact with the robot by performing gestures or showing emotions to the camera, pressing a button, or using a capacitive touch sensor. By keeping the number of physical inputs to a minimum, this avoids users finding it difficult to use the robot.
From using unit testing for the software, and running a user study for the physical product, the project finds that producing a high-quality socially interactive robot that makes improvements on current solutions is viable and affordable.
Project Fair Poster